Highways and Tunnels: Force Feedback Guidance for Visualisations
EuroVis 2024
Authors
Submission Video
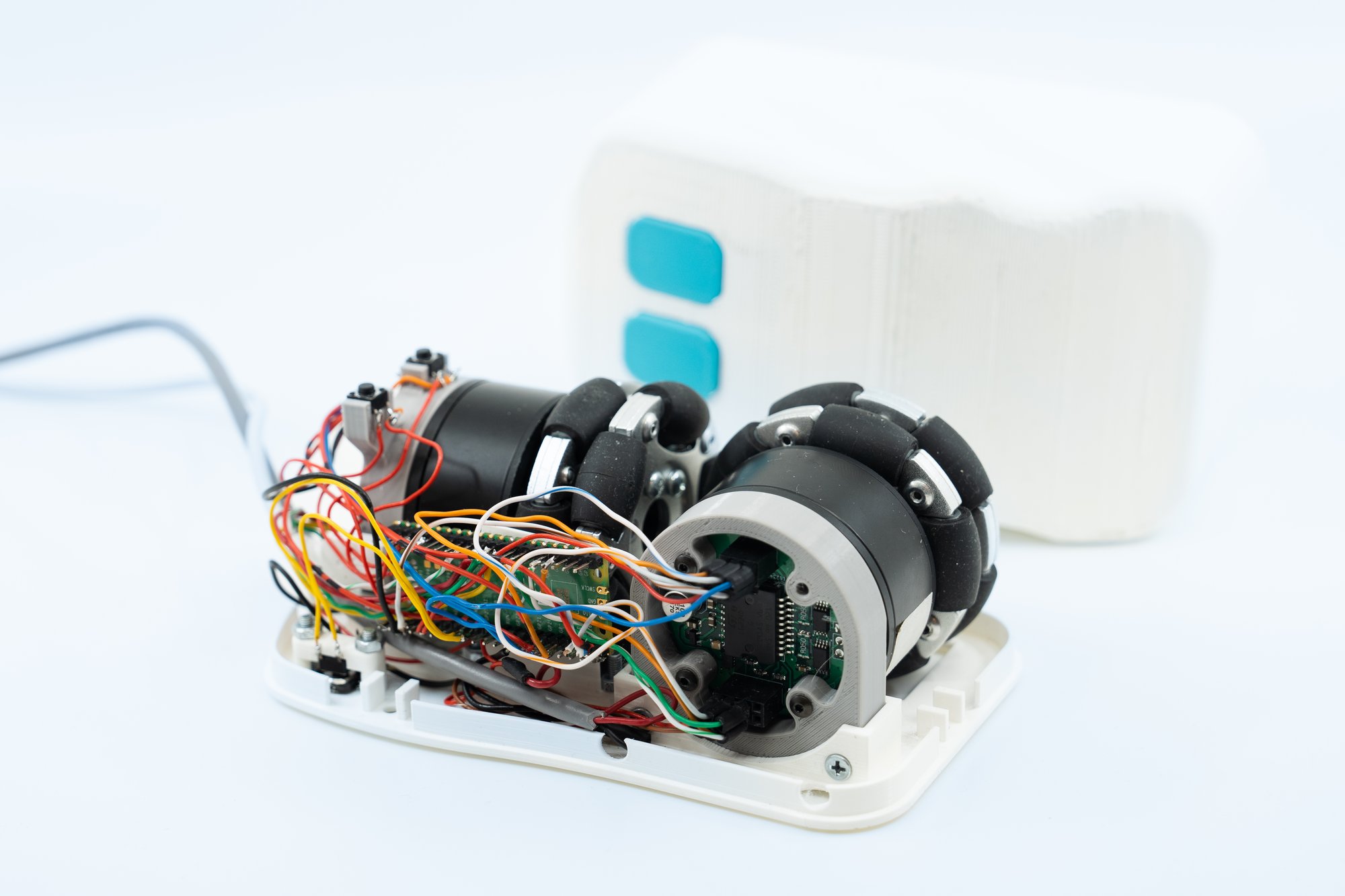
The Castor force feedback mouse

- be relatively easy and cheap to source parts for.
- be relatively easy to make using tools available in most maker-spaces.
- provide detailed and forceful actuation (which requires motors of significant size and heft),
- while remaining as close in looks and experience to a regular mouse as possible.

User study and demo application
To explore how the use of force feedback guidance affects user behavior and experience, a simple Electron app was developed, which lets the user navigate across a subset of the Cartograph map of Wikipedia. Using a flag in the code, the application may be converted between a user-study mode, where the user is put through a sequence of targets and feedback types, or a demo mode, where the user may freely explore the map and feedback configurations. In user-study mode,- users are presented with a sequence of 9 tasks of locating a topic on the map. Each task applies a different combination of no, weak and strong force feedback pulling and constraining. Latin square counterbalancing is applied using the participant id.
- targets and starting points are picked randomly from a directionally-balanced pool of equal distances.
- questionaire answers are collected after each completed task.
- the cursor position on the screen and on the canvas is logged every 100 ms.
Citation in BibTeX
To cite this article, we encourage you to use the following bibtex entry in your citation manager:
@inproceedings{Alroee_highways2024,
title = {Highways and {Tunnels}: {Force} {Feedback} {Guidance} for {Visualisations}},
isbn = {978-3-03868-251-6},
doi = {10.2312/evs.20241060},
booktitle = {{EuroVis} 2024 - {Short} {Papers}},
publisher = {The Eurographics Association},
author = {Alrøe, Sarah Fjelsted and Hoggan, Eve and Schulz, Hans-Jörg},
editor = {Tominski, Christian and Waldner, Manuela and Wang, Bei},
year = {2024},
}